DISEÑO DE SISTEMA AUTOMÁTICO DE ALINEACIÓN DE CÁMARAS MEDIANTE TRIANGULACIÓN
1Julio A. Grajales-Flores , 2Gabino Martínez-Cruz, 2Manuel G. Espinoza-Hernández
1Instituto Nacional de Astrofísica, Óptica y Electrónica (INAOE), Laboratorio de Visión por Computadora Puebla, México
jagrajales@inaoep.mx
2Secretaría de Marina, GTT Garfio3, CDMX, México
gabino martinez@semar.gob.mx, mgespinoza@semar.gob.mx
Resumen—En estos días, los sistemas de seguridad de armas modernos requieren de una alta precisión, por lo cual, el diseño de aplicaciones más eficientes es requerido. En este trabajo de in- vestigación se describe la implementación y aspectos de seguridad de un esquema que realiza la alineación automática de un arreglo de cámaras, con base en la triangulación de objetos para obtener una alineación muy precisa entre el director de tiro y el montaje. De acuerdo a los resultados obtenidos, el prototipo desarrollado puede considerarse como una buena alternativa para aplicaciones de alineación, así mismo se consideró´ la integración de servicios de autenticación, confidencialidad e integridad para incrementar la seguridad.
Index Terms—Alineación, Seguridad, Hardware, Automatización, Triangulación, Directores de tiro.
INTRODUCCIÓN
El término Sistema de armas es una generalización que comprende un amplio espectro de componentes y subsistemas, los cuales varían desde simples dispositivos ofensivos/ defensivos y plataformas de lanzamiento, que pueden ser de una clase diferente de acuerdo al buque o unidad flotante que se tome como referencia, en términos generales, haremos referencia a esta expresión como la integración de un sistema de control de tiro y uno o varios cañones (figura 1).
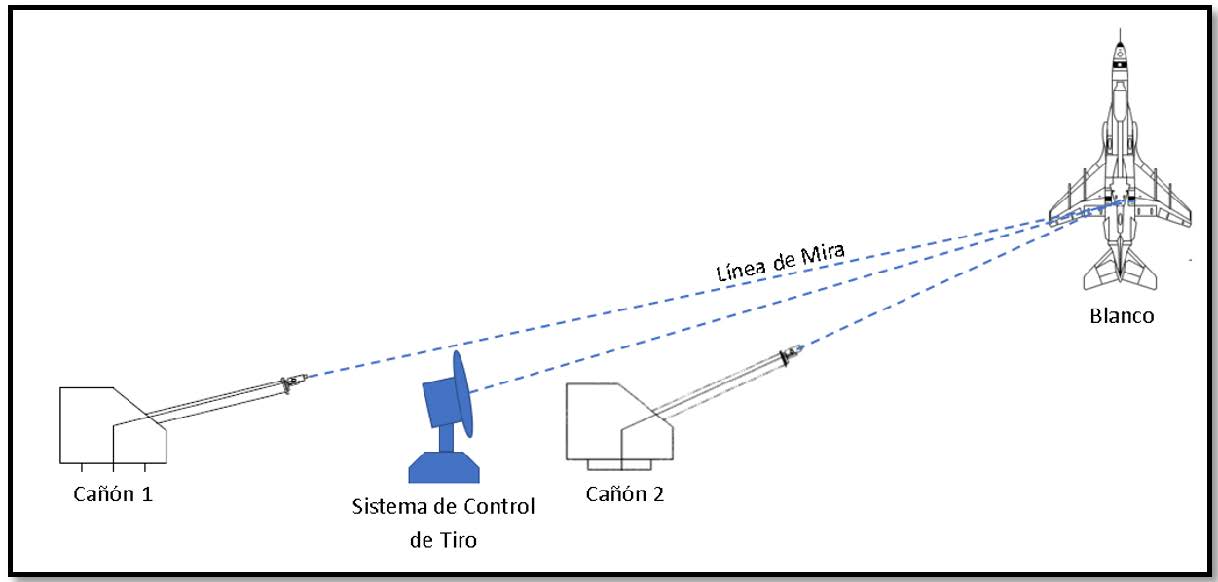
Figura 1. Representación de un sistema de armas compuesto por 2 cañones y un sistema de control de tiro
Se le denomina cañón, a la pieza mecánica que es capaz de eyectar una munición o dispositivo explosivo con fines de disuasión, defensa o ataque, el cual se encuentra montado sobre la superficie plana de un buque. Esta conformado de diferentes partes, siendo la boca de fuego una de las más importantes, porque desde esta pieza es eyectada la munición (figura 2).
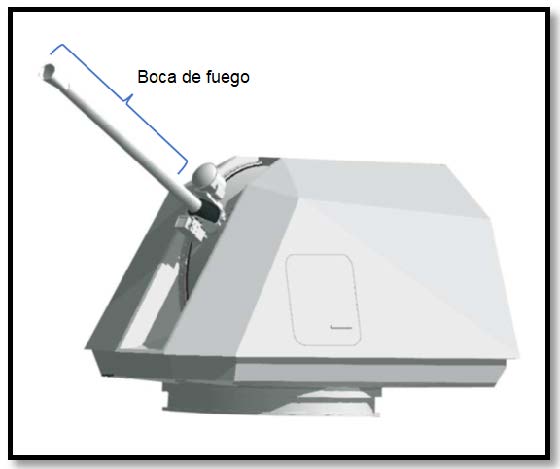
Figura 2. Representación de un cañón con su boca de fuego
La eficiencia de los sistemas de armas dependen de varios aspectos, sobre todo del tipo de sistema al que se haga referencia. En este caso, en específico se hará alusión a un sistema de armas consistente en una pieza de artillería conocido como montaje (cañón) y un director de tiro electro-óptico (figura 3), estos componentes trabajando en conjunto tienen una eficiencia de tiro promedio del 80 %, este valor depende de varios factores como: el cálculo balístico, la dispersión del montaje, la capacidad del director de tiro para la adquisición, filtrado y traqueo de blancos, así mismo dependerá de la alineación del sistema de armas. Todos estos factores influyen en igual escala, por lo que es necesario asignarles el mismo nivel de importancia, ya que todos son dependientes unos de otros.
En este trabajo, se presenta en forma general la implementación de un prototipo para llevar a cabo el método de alineación de un sistema de armas. El objetivo de esta aplicación es realizar una alineación muy precisa entre el director de tiro y el montaje. Por otro lado se mencionan algunos aspectos relevantes de seguridad que pueden implementarse para mejorar el sistema como manejo de llaves y protocolos de comunicación. Este tema es de vital importancia, ya que cada vez, mejores sistemas de seguridad en armas son requeridos. Por otro lado, para que los disparos acierten sobre el blanco, los sistemas requieren un alto grado de precisión. Actualmente, algunos métodos para realizar la alineación de sistemas de armas, se basan en la utilización de miras telescópicas y teodolitos, pero ambos anteponen como requisito que el buque se encuentre en seco (en dique), para que la alienación pueda llevarse a cabo de manera precisa. Estos métodos son tardados y costosos por el procedimiento que conlleva poner un buque en seco.
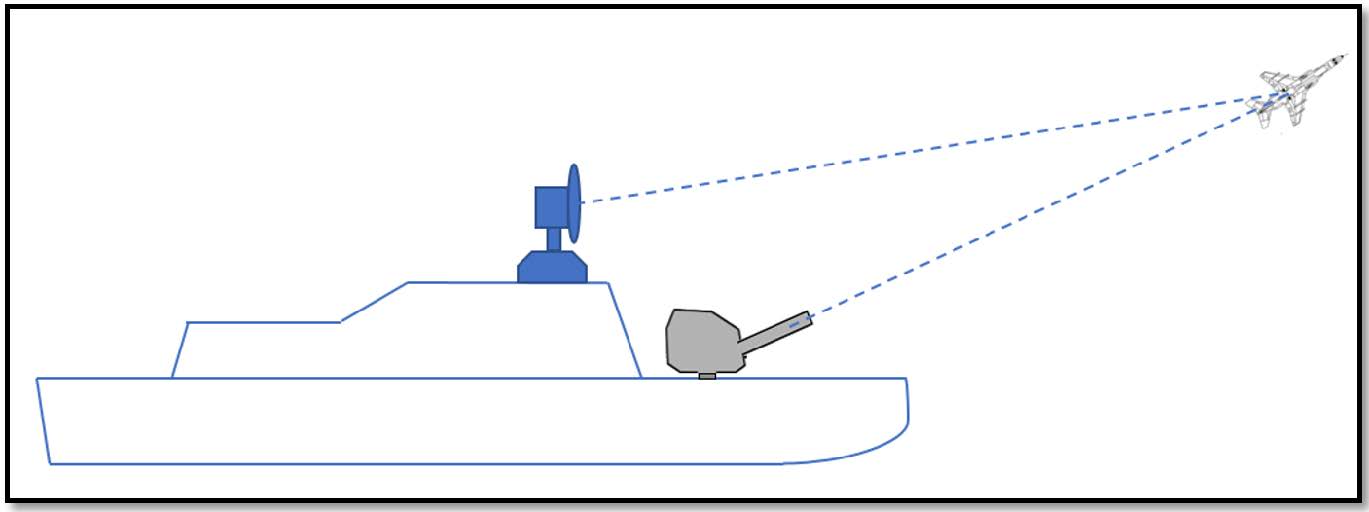
Figura 3. Representación de una alineación dinámica, considerando un Director de Tiro y un Cañón.
II. ALINEACIÓN
En un escenario real, tanto el sistema de control de tiro, como los cañones deberán estar apuntando al blanco en el mismo punto, para poder llegar a efectuar esto, es necesario realizar un ejercicio que asegure la convergencia de la mira de estos elementos. Por consiguiente, la alineación, es un proceso que debe llevarse a cabo en los sistemas de armas. Además, debe ejecutarse como parte de la integración y puesta a punto para la correcta operación de dicho sistema. Por otro lado, la inexactitud de la alineación ocasionará que, en alguno de los módulos, su línea de mira este observando un punto diferente al requerido, ocasionando con esto, una mala lectura y a su vez, una mala ejecución del problema [8].
La alineación estática consiste en colocar un cañón y un sistema de control de tiro, en planos paralelos, respecto a un punto de referencia, el cual, normalmente es un equipo externo al sistema de armas, llamado giroscópica. Los tres planos (x, y, z) de cada sistema, son comparados con las lecturas de los planos del equipo de referencia, esta medición generará un valor de error, el cual será agregado en los módulos respectivos para compensar esa diferencia, consiguiendo así que todos los módulos estén referenciados al mismo punto [11].
La alineación dinámica es en la que se enfoca este trabajo. Este proceso se lleva a cabo una vez que fue efectuada la alineación estática y consiste en colocar a punto la línea de mira de cada uno de los elementos del sistema de armas, considerando un punto de referencia a cierta distancia. Tomando como base la alineación anterior, los puntos de vista de cada módulo no deberán estar muy desfasados, sin embargo, para garantizar un ajuste fino, se ejecuta esta alienación, consiguiendo eliminar los errores mínimos que puedan existir. Normalmente se posiciona un blanco fijo a línea de vista a una distancia de tres kilómetros, para así hacer converger las líneas de mira de cada uno de los módulos [12].
III. MÉTODO DE ALINEACIÓN POR TRIANGULACIÓN
La problemática que se requiere resolver con el desarrollo del equipo de alineación dinámica de cámaras por triangulación, consiste en realizar la alineación del armamento con el buque a flote en amarras con el fin de disminuir los tiempos y costos de los métodos de alineación usados actualmente a bordo de los buques, al dejar de ser una condicionante que el buque se encuentre en dique. Además, este método permite mejorar la alineación del armamento e implícitamente mejorar la eficiencia de los sistemas de armas.
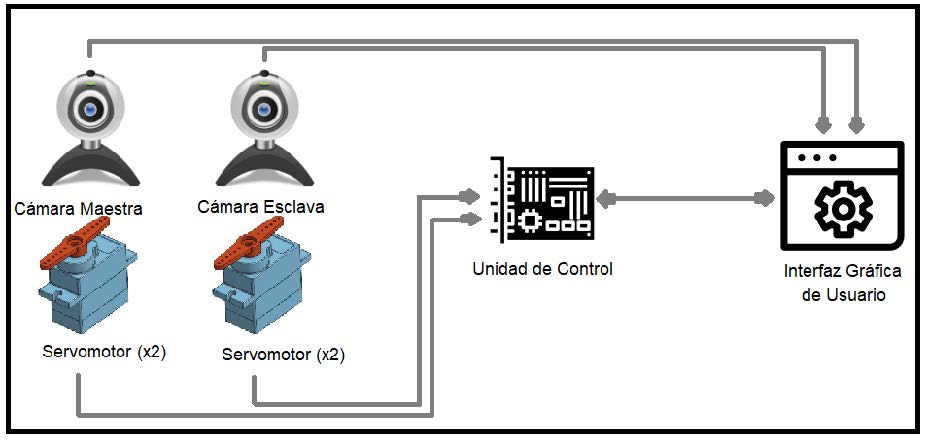
Figura 4. Diagrama del sistema de alineación propuesto
En la figura 4, se muestra el diagrama a bloques de los componentes que conforman el prototipo del sistema de alineación dinámica, se presenta la integración de sensores (cámaras), actuadores (servomotores), unidad para controlar los servomotores (tarjeta de control) y la interfaz gráfica de usuario ejecutándose sobre una PC portátil, que proporciona un entorno visual sencillo para ingresar y obtener datos de la unidad de control.
En el prototipo, se desarrolló un algoritmo de triangulación en una tarjeta arduino y una interfaz de usuario, en la cual se puede administrar el control de los cuatro servomotores, los cuales están instalados en dos brazos mecánicos de un sistema pan & till con movimientos rotativos en el eje horizontal y vertical (elevación), donde se instaló una cámara web en cada brazo mecánico, con la finalidad de simular los movimientos del director de tiro y el cañón de un sistema de armas. Los ejes ópticos de las cámaras web simulan la línea de mira, correspondientes a las cámaras de un director de tiro electro-óptico y a la línea de mira de la boca de fuego del cañón. El método que se propone consiste en posicionar el eje óptico de una cámara web, montada sobre un brazo robotizado (cámara maestra) visualizando un blanco en el horizonte, se obtienen los ángulos del eje vertical y horizontal del brazo mecánico, siendo necesario realizar telemetría, para conocer la distancia existente entre el eje óptico de la cámara maestra y el blanco simulado. El valor de la distancia medida se introducirá a la interfaz gráfica de usuario desde donde se enviará por puerto serial USB, el dato a la unidad de control para realizar los cálculos de triangulación y obtener los ángulos del posicionamiento del eje vertical y horizontal del brazo mecánico de la cámara esclavo, mostrando en la interfaz gráfica, el valor de los ángulos del problema solucionado y comparando que las imágenes se encuentran focalizando el mismo punto en el horizonte, asimismo el sistema será capaz de realizar los cálculos matemáticos para corregir el valor de la distancia longitudinal y altura que existen entre los ejes de giro de los brazos mecánicos, donde se encuentran instaladas las cámaras [2].
III-A. Ecuaciones implementadas para resolver el problema de triangulación
Cuadro I. VARIABLES UTILIZADAS EN EL PROCESO DE TRIANGULACIÓN
| a) Elc,m = Elevación Cámara Maestro |
| b) Rzc,m = Ronza de Cámara Maestro |
| c) Doc,m = Distancia del objetivo desde la Cámara Maestro |
| d) Ezc,e = Ronza Cámara Esclavo |
| e) Elc,e = Elevación Cámara Esclavo |
| f) Dc,e = Distancia del objetivo desde la Cámara Esclavo |
| g) Dh = Componente Horizontal |
| h) Ae,m = Altura Cámara Esclavo con respecto a Cámara Maestro |
| i) Le,m = Longitud Cámara Esclavo con respecto a Cámara Maestro |
| j) Xc,m = Componente en X de la Cámara Maestro |
| k) Yc,m = Componente en Y de la Cámara Maestro |
| l) Zc,m = Componente en Z de la Cámara Maestro |
| m) Xc,e = Componente en X de la Cámara Esclavo |
| n) Yc,e = Componente en Y de la Cámara Esclavo |
| o) Zc,e = Componente en Z de la Cámara Esclavo |
III-B. Procedimiento para realizar la triangulación y corrección de la alineación
Considerando que el director de tiro y el montaje en un escenario real se encuentran en diferentes distancia longitudinal y altura, se tomó esta idea como base para colocar las cámaras en posiciones diferentes para simular ese entorno, a continuación, se miden los datos de las variables h), i), después se posiciona el eje óptico de la cámara maestra visualizando un punto objetivo de referencia para determinar los datos de a), b), con esa información se calcula la distancia existente de la cámara maestra al punto de referencia c) (Cuadro I). Después se realiza el cálculo de las siguientes ecuaciones para conocer el valor de las variables y realizar la triangulación (Cuadro II).
Cuadro II. ECUACIONES IMPLEMENTADAS PARA RESOLVER EL PROBLEMA DE TRIANGULACIÓN.
| Dh = D0cos(Elc,m) |
| Xc,m = Dhcos(RZc,m) |
| Yc,m = Dhsen(RZc,m) |
| Zc,m = D0sen(Elc,m) |
| Xc,e = Xc,m − (Le,m) |
| Yc,e = Yc,m |
| Zc,e = Zc,m − Ap,d |
 |
 |
IV. RESULTADOS
IV-A. Caso de prueba
Para este caso, se proyectó sobre una superficie la imagen de un helicóptero como objetivo designado, posteriormente se calculó la distancia hacia el objeto, haciendo uso de un medidor láser. La figura 5 muestra la Interfaz Gráfica de Usuario con los datos de la primera aproximación, de lado izquierdo se presenta la visión de la cámara principal apuntando a la parte inferior de la imagen del helicóptero, del lado derecho se presenta la visión de la cámara secundaria, donde se puede apreciar que no está alineada tomando como base la imagen de la izquierda.
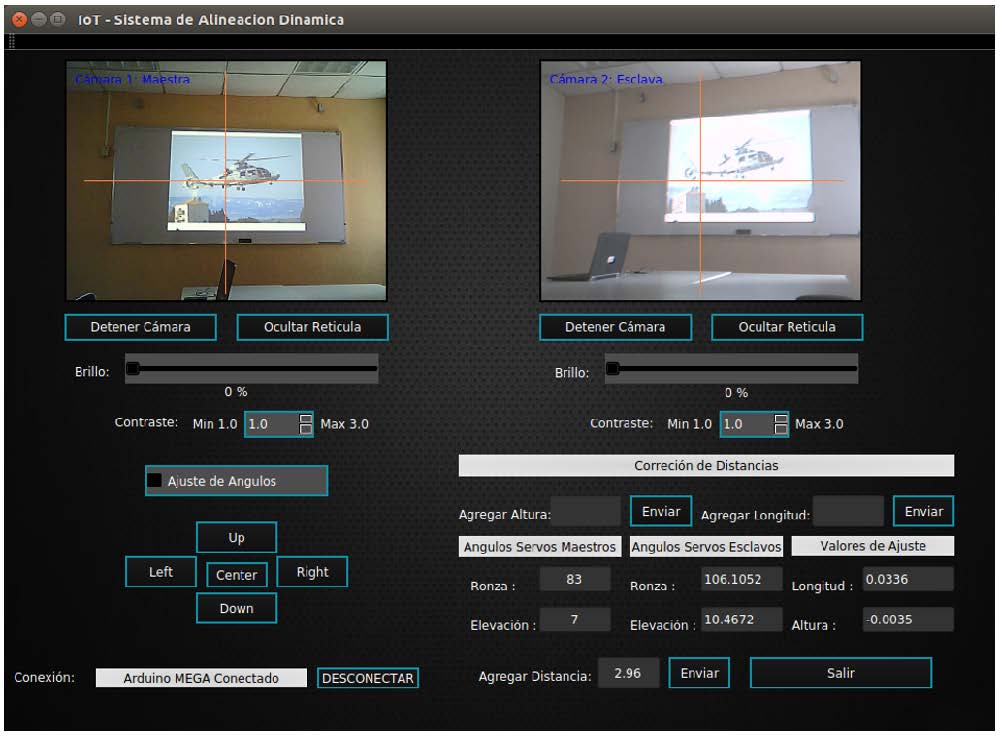
Figura 5. Caso de prueba sin corrección
Tal como se muestra en la figura 5, el conjunto de servos esclavos, no apuntó directamente a donde estaba el objeto, esto debido a que la distancia del objeto aun no era conocido, como paso a seguir, es la identificación del objeto. Para nuestro caso, su distancia es de 3.52m, la cual se obtuvo al hacer uso de un telémetro láser, una vez agregado ese dato, la solución se muestra en la figura 6, donde se aprecia que la visión de ambas cámaras se encuentra alineada.
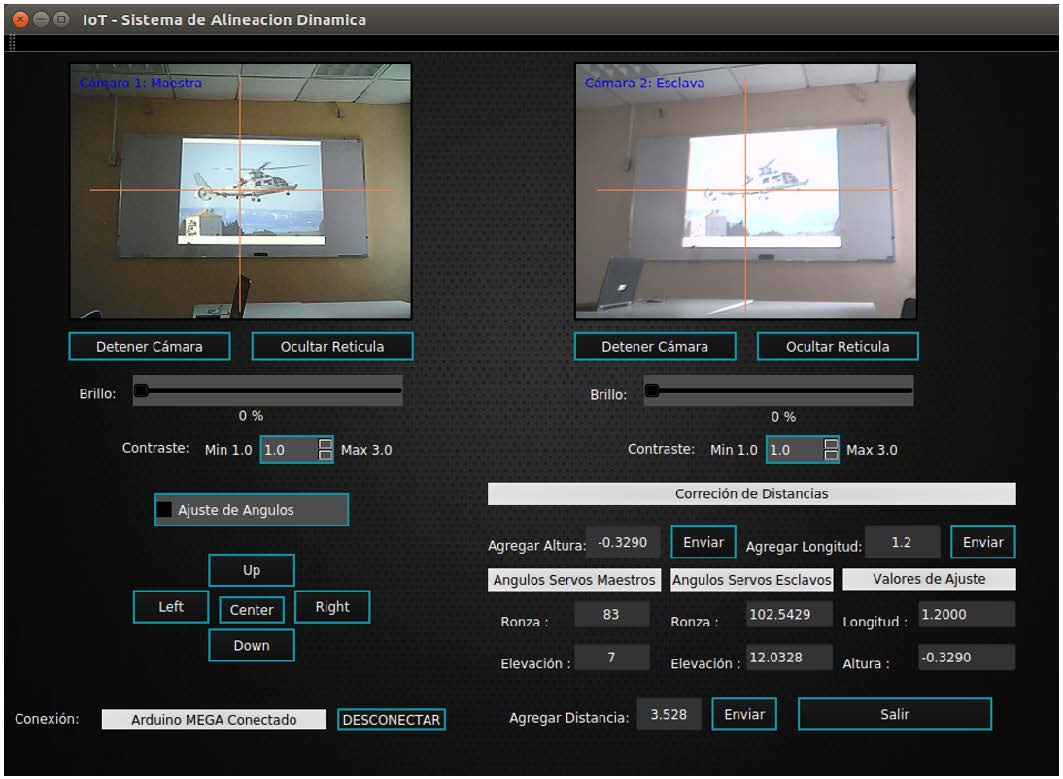
Figura 6. Caso de prueba con corrección
Aunque visualmente se puede percibir que la corrección es exacta, se corroboró la información haciendo uso de la herramienta Matlab, donde la simulación arrojó la gráfica que se observa en la figura 7. La etiqueta Maestro indica la posición de la cámara principal y la etiqueta Esclavo indica la posición de la cámara secundaria, la cual se encuentra a diferente distancia longitudinal y altura, la línea en azúl que recorre el eje x indica el eje óptico de la cámara maestra, la cual se intersecta con la línea roja que representa el eje óptico de la cámara esclava, se puede concluir que el eje óptico de ambas cámaras se encuentran alineadas al objetivo designado.
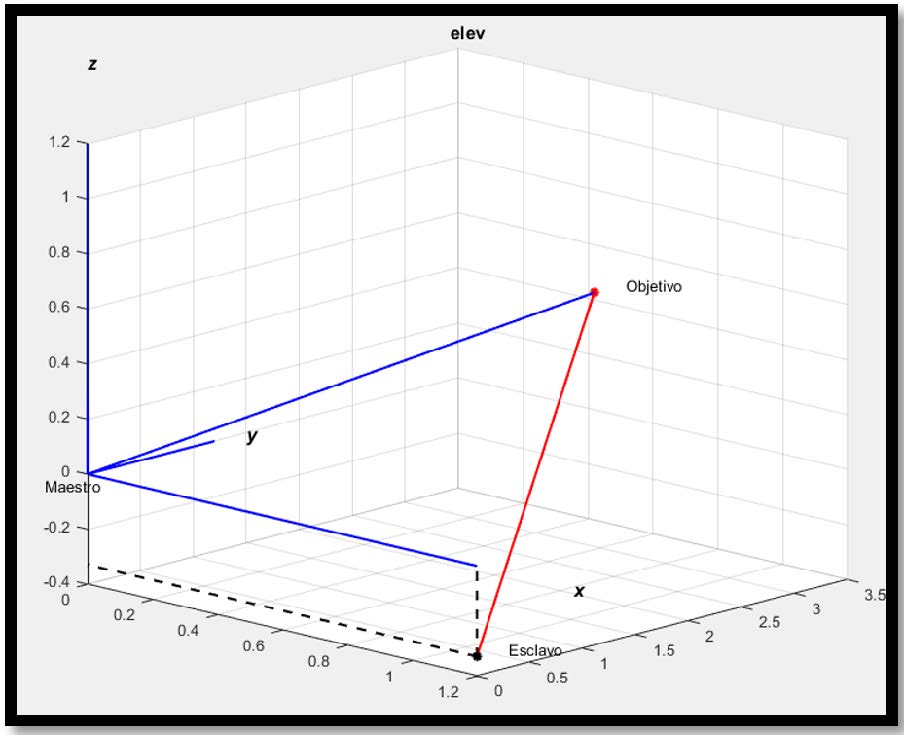
Figura 7. Simulación del caso de prueba.
Con ello se corrobora que los cálculos efectuados son correctos, tanto en la simulación como en la implementación de la interfaz, en conjunto con el control de los servos.
Como se pudo apreciar en la prueba anterior, el resultado fue preciso, considerando distancias, posiciones y ángulos, corroborando estos resultados a través de la simulación en Matlab.
Algunas de las limitaciones identificadas en este prototipo, es la precisión en el ensamble de los brazos mecánicos, los cuales no están bien rectificados, lo que puede ocasionar un desfase en lo que realmente están viendo las cámaras, puesto que nuestra primera consideración es que las cámaras estén posicionadas en un punto 0,0,0 para las coordenadas de X, Y y Z. La solución, es un ensamble con tolerancias más precisas. Otra de las limitantes son los servomotores, los cuales tiene un paso o resolución de 1°, siendo que los cálculos dan una solución en milésimas de ángulo, considerando que estos bloques de servomotores y junto con las cámaras, son únicamente demostrativos, pueden ser aceptables estos valores de los servomotores, puesto que la implementación en el campo real, se harán con motores con resolución a milésimas de grado.
V. ASPECTOS DE SEGURIDAD EN EL SISTEMA
El prototipo actual está implementado con una comunicación alámbrica usando un protocolo serial, esto en el entorno real consideraría el uso de cableado extenso, ya que las distancias reales entre el montaje y el director de tiro son de varios metros, por esa razón, para la siguiente versión del prototipo se podría sustituir por una comunicación inal´ambrica. Lo anterior implicaría cambios en la arquitectura propuesta, además de agregar servicios de seguridad como son la autenticación, la confidencialidad y la integridad, los cuales son importantes en un sistema que será usado en un entorno militar. La autenticación es el servicio que trata de asegurar que una comunicación sea auténtica, es decir, verificar que el origen de los datos es el correcto, quién los envío y cuándo fueron enviados y recibidos también sean correctos [9]. Actualmente, la forma de autenticación usando nombre de usuario y contraseña es la más utilizada, por esa razón se debe utilizar un algoritmo de cifrado de contraseñas que sea confiable y seguro. Los algoritmos hash más recomendados actualmente para proteger contraseñas son: Scrypt [3], Bcrypt [10], Argon2 [1], Sha512crypt [6]. Estos algoritmos serán analizados y se seleccionará el que presente mayor ventaja para el sistema propuesto. La confidencialidad es la capacidad de garantizar que la información almacenada en el sistema informático o transmitida por la red. Solamente va a estar disponible para aquellas personas autorizadas a acceder a ella. Si los contenidos son obtenidos por personas ajenas se busca que ´estos no puedan acceder a la información o a su interpretación [9]. La integridad busca mantener los datos libres de modificaciones no autorizadas. En otras palabras, la integridad se orienta a mantener con exactitud la información tal cual fue generada, sin ser manipulada ni alterada por personas o procesos no autorizados [9]. Para establecer un canal seguro en una comunicación inalámbrica, se puede hacer uso de algoritmos de cifrado simétrico, de esta forma se puede conseguir confidencialidad e integridad sin perder velocidad de transferencia de datos. Los algoritmos de cifrado más importantes y que serán analizados para ser incluidos en el prototipo son: Data Encryption Standard (DES) [4], Triple DES (3DES) [7], Advanced Encryption Standard (AES) [5].
VI. CONCLUSIONES Y TRABAJO FUTURO
En este trabajo, no se logra eliminar la corrección para ángulos menores a 1 grado, pero como se expresó con anterioridad, las limitantes de los equipos que se están usando para implementación y validación de los cálculos, no nos lo permiten, sin embargo, los cálculos, dan solución a problemáticas en milésimas de grados, haciendo con esto un algoritmo muy funcional.
Con esta aplicación y en conjunto con los cálculos de triangulación, este proyecto es totalmente escalable a versiones futuras en la cuales se les podría incluir mejoras, para adquisición de valores y control de varios cañones que se encuentra en barcos más grandes, agregar la adquisición de valores para correcciones de ángulos y distancias desde otro sensores del barco, como lo son radares, GPS, giroscópicas entre otros, también agregar un módulo de designación de objetivos por procesamiento de imágen para la detección de los mismos y varios más. Como trabajo futuro se propone implementar funciones hash y algoritmos criptográficos para mejorar la seguridad de la plataforma de software en el sistema.
REFERENCIAS
- [1] Biryukov, A., Dinu D., Khovratovich D. ”Argon2: the memory-hard function for password hashing and other applications”, University of Luxemburgo, March 2017.
- [2] Cock, J. D. ”El método de la triangulación aplicado en un escaner láser, para objetos tridimensionales”, Revista Universidad EAFT, 654, pp 25-31, Diciembre 2000.
- [3] Colin Percival. ”Stronger Key Derivation Via Sequential Memory-Hard Functions”.
- [4] Han, S.-J., Oh, H.-S., and Park, J. ”The improved data encryption standard (des) algorithm. In Spread Spectrum Techniques and Applications Proceedings”, 1996., IEEE 4th International Symposium on (Sep 1996), vol. 3, pp. 1310-1314 vol. 3.
- [5] Jamil, T. ”The rijndael algorithm”, IEEE Potentials 23, 2. April 2004.
- [6] Movable Type Scripts. ”Sha-512 Cryptographic Hash Algorithm”, Sitio web: https://www.movable-type.co.uk/scripts/sha512.html, Agosto 2018.
- [7] Nadeem, A., and Javed, M. Y. ”A performance comparasion of data encryption algorithms”, In 2005 International Conference on Information and Communication Technologies, pp 84-89. Aug. 2005.
- [8] Reglerteknik S. ”Aligner 224 Optical Tracking Evaluation System”, de Schill Reglerteknik Sitio web: https://www.schill.se/aligner-224, Marzo 2018.
- [9] Stallings, W. ”Cryptography and Network Security: Principles and Practice”, 5th ed. Pretince Hall Press, Upper Saddle River, NJ, USA, 2010.
- [10] Stufft, Donald. ”bcrypt: Modern password hashing for your software and your servers”, PyPl.
- [11] Taylor. G. & Kleeman. L. ”Fundations of Visual Perception and Control. At Visual Perception and Robotic Manipulation”, pp 16-71, Germany: Springer.
- [12] Universidad Politécnica de Madrid. ”Métodos Topográficos”, de OpenCourseWare Sitio web: http://ocw.upm.es/expresion-grafica-en-laingenieria/dibujo-de-construccion/contenidos/MetodosTopograficos/dc3-metodos-topograficos.pdf, Marzo 2018.
- ISSN: 3061-8991
- Vol 1, 2025